Undergraduate Researcher – GNC, Autonomous/Embedded Systems, & Test Design
November 2024 – Present
Non-Linear Autonomous Control, Exploration, Intelligence & Systems Lab (N-ACXIS), UIUC
Develop 3 real-time experiments to validate 3D Guidance, Navigation and Control (GNC) algorithms, integrated with machine learning, for swarms of heterogeneous UAVs navigating unmapped, GPS-denied environments.
Implement ROS2/Python based autonomy stack integrating SLAM, multi-agent coordination, and robust obstacle avoidance on 3+ UAVs & Ground based robots.
Utilizie the Qualisys Motion Capture System & On-board SLAM in robots at the UIUC drone research lab.
Simulate and optimize nonlinear flight dynamics using LQR, PID, and Robust Control techniques in Python and Simulink.
Design and execute full experimental pipeline from control law modeling to log analysis and performance evaluation.
Preparing weekly technical presentations to keep Dr. Tsukamoto updated on progress and further plans.
Undergraduate Researcher & First Author – Numerical Methods & Data Analysis
May 2023 – May 2024
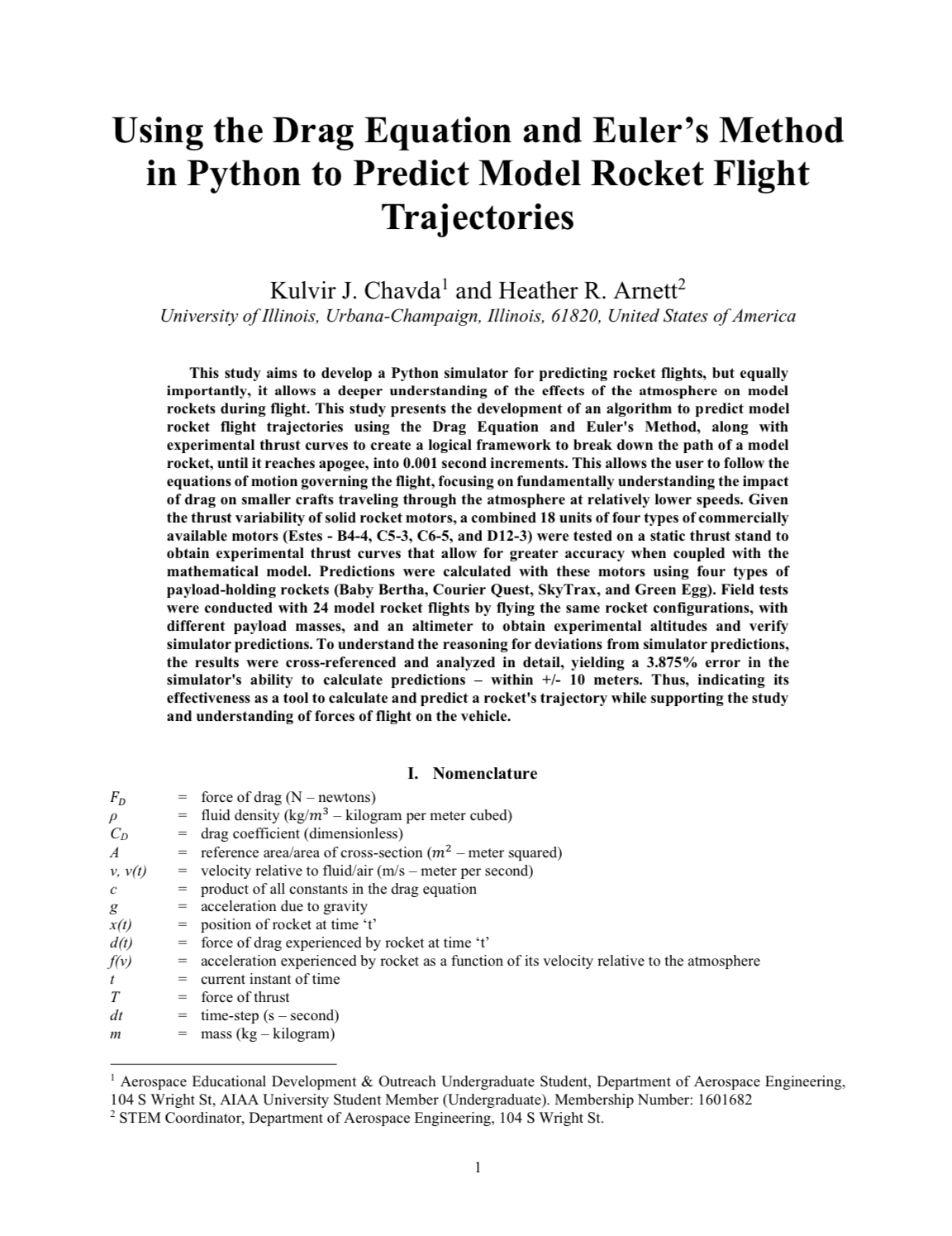
Title (Published as a winning conference paper by AIAA):
Using the Drag Equation and Euler’s Method in Python to Predict Model Rocket Flight Trajectories
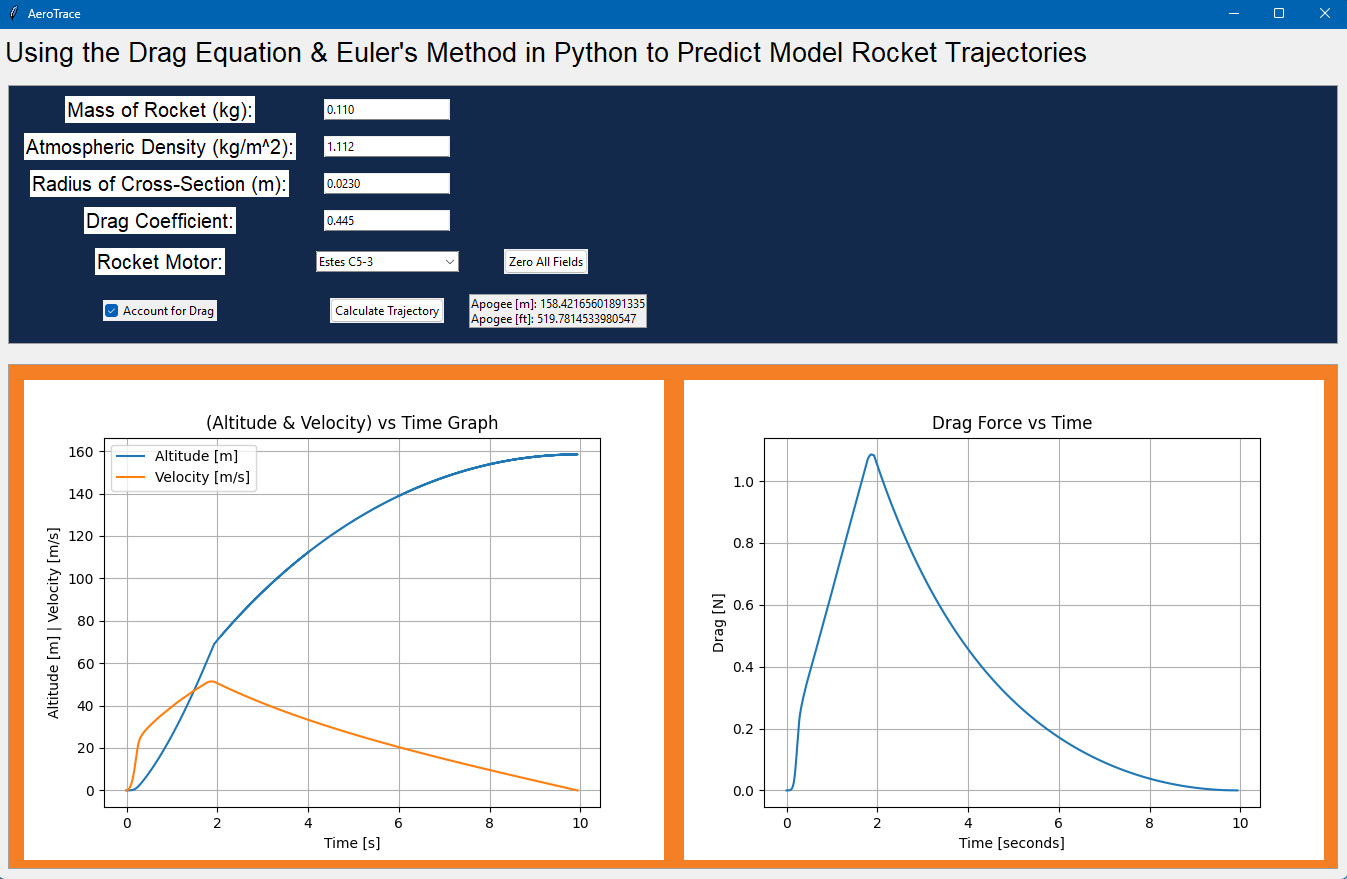
Utilized rocket flight data (24 flights), thrust tests, & Python to write an algorithm that predicts accurate rocket trajectories.
Conducted 25+ solid rocket-motor thrust tests to create accurate theoretical thrust curves to plug into python algorithms.
Designed the algorithm structure and developed a Python application with a GUI (Graphical User Interface) to take user input and output graphs depicting altitude vs. time and drag force vs. time for the model rocket, both with and without drag.
Gained approval from the university to submit an abstract to the 2024 AIAA Region III Conference, and got accepted.
Wrote a paper and polished it over 6 months with advice from Heather Arnett (STEM Advisor) and my professors.
Prepared detailed schematics and visuals for my conference presentation and delivered a 30-minute talk on the same.
Paper was awarded 3rd place at the conference in April 2024, and was published on AIAAs Arc platform in July 2024.